近日,能源与动力工程学院闫晓军教授团队发明了一种用于昆虫尺寸机器人的微型动力系统,并以此为基础,研制了一种快速机动、高载重、无线可控的微型机器昆虫“BHMbot,BeiHang Microrobot”(身长2 cm,重1.76 g,含能源、控制、通讯和传感模块)。2024年5月8日,相关研究成果以“A Wireless Controlled Robotic Insect with Ultrafast Untethered Running Speeds”为题在线发表于《Nature Communications》杂志,这是北航发动机领域的首篇子刊级论文。北航能源与动力工程学院刘志伟助理教授、詹文成博士生为第一作者,北航能源与动力工程学院闫晓军教授、清华大学集成电路学院伍晓明副教授为通讯作者,北京航空航天大学为第一完成单位。
仿生机器昆虫具有尺寸小、运动灵活、可达性好等突出优势,在灾后救援、大型机械装备检修、信息获取等领域具有广泛应用前景。在微小体积限制下完成能量的高效转化和运动轨迹的精确输出,研制微型动力系统及机器昆虫面临的挑战有“如何提高微型动力系统的能量转换效率”“如何提高机器昆虫的载重能力”“如何精确控制机器昆虫的运动轨迹”等3个方面。
为提高微型动力系统的能量转换效率,团队发明了一种基于直线式驱动和柔性铰链传动的新型动力系统,可以在厘米尺寸下实现能量的高效转化。微型动力系统中,直线式驱动器将输入的电能转化为机械能,并向外输出机械振动;柔性铰链传动机构将这种振动转换为仿生腿的周期振动(图1de)和机器昆虫机体的高频弹跳运动(图1h),最终实现电能到动能的高效转换(图1)。
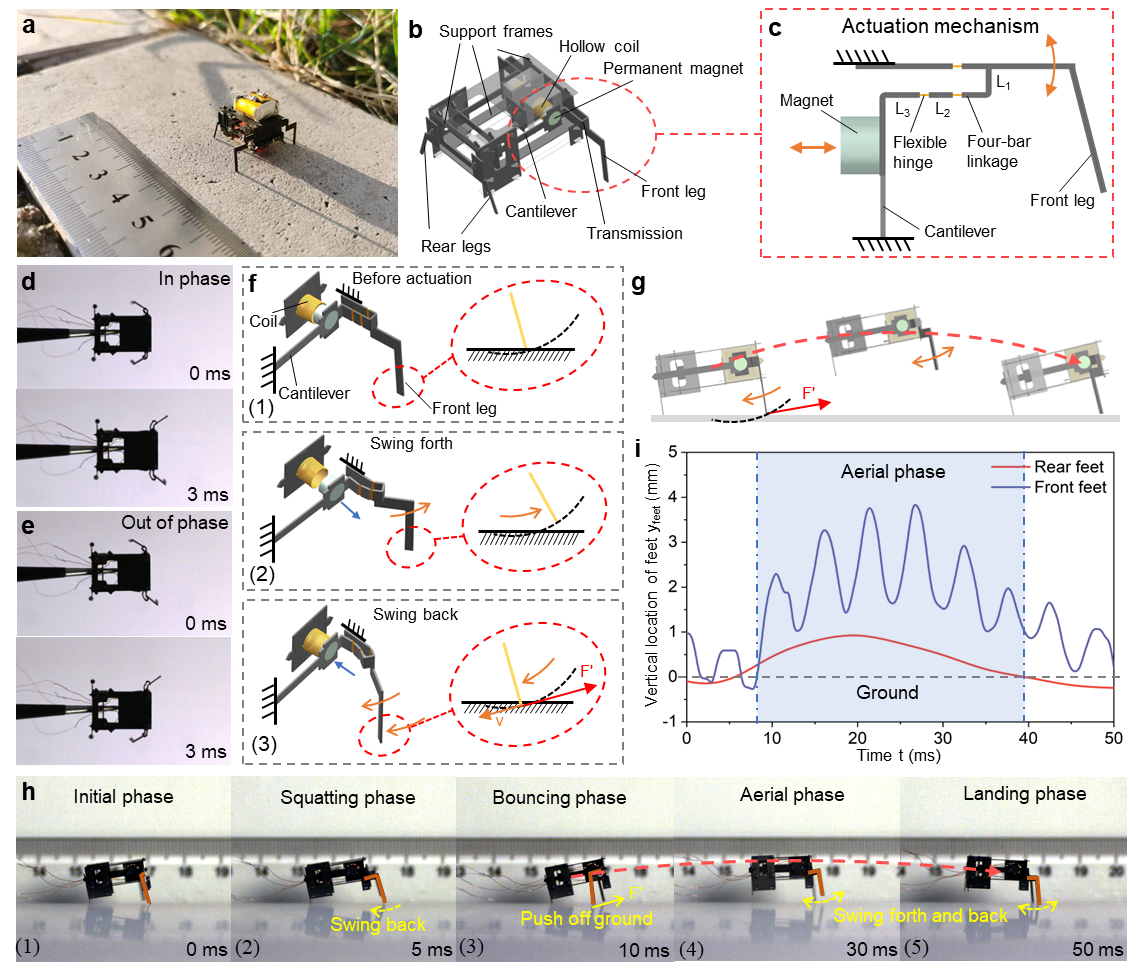
图1 微型动力系统工作原理和BHMbot机器昆虫运动机理
针对现有机器昆虫载重后性能衰退的问题,团队设计并实现了一种仿生奔跑步态(视频1)。奔跑过程中,BHMbot机器昆虫可以通过自身步频和步幅的自适应调节,实现高载重下的快速爬行。现有昆虫尺寸机器昆虫在集成电源和控制模块等载重后会出现速度骤降的现象(下降幅度可达90%),BHMbot机器昆虫能够通过跳跃频率的增加抵消单次跳跃步幅衰减带来的影响,当承载5.5倍自身质量的重物后,BHMbot仍能维持25倍身长每秒的速度(视频2)。当载重低于一定临界值时,BHMbot机器昆虫运动速度甚至可以实现随载重增加而上升的趋势(图2a)。
视频1-仿生奔跑步态
视频2-带载快速爬行
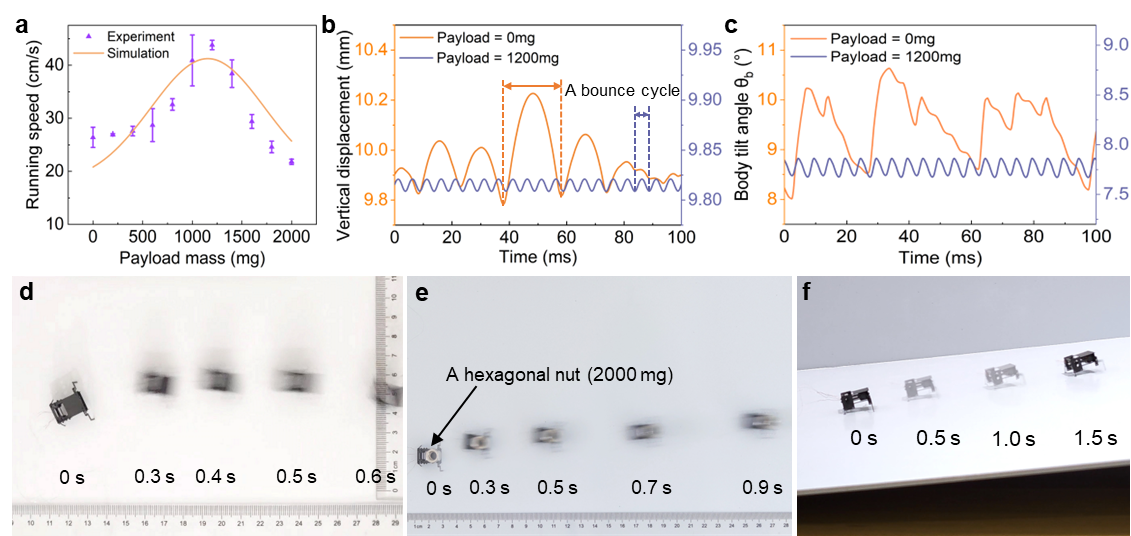
图2 BHMbot机器昆虫高承载机理
针对机器昆虫的轨迹控制,团队提出了一种基于双腿频率差的控制方法,仅用两路驱动器即可实现BHMbot机器昆虫的驱动和方向控制。基于提出的控制方法,团队研制了厘米级的微型控制和通讯电路(图3de),在集成能源、控制和通讯模块后,BHMbot机器昆虫可实现程序控制和遥控控制。通过预设程序,BHMbot机器昆虫可以实现圆形、矩形(见视频3)和字母“BUAA”运动轨迹(见视频4);同时,通过电脑或手机端发送实时控制指令,BHMbot机器昆虫可采用无线遥控的方式实现运动避障(见视频5)。
视频3-圆形和矩形轨迹
视频4-字母轨迹
视频5-遥控避障
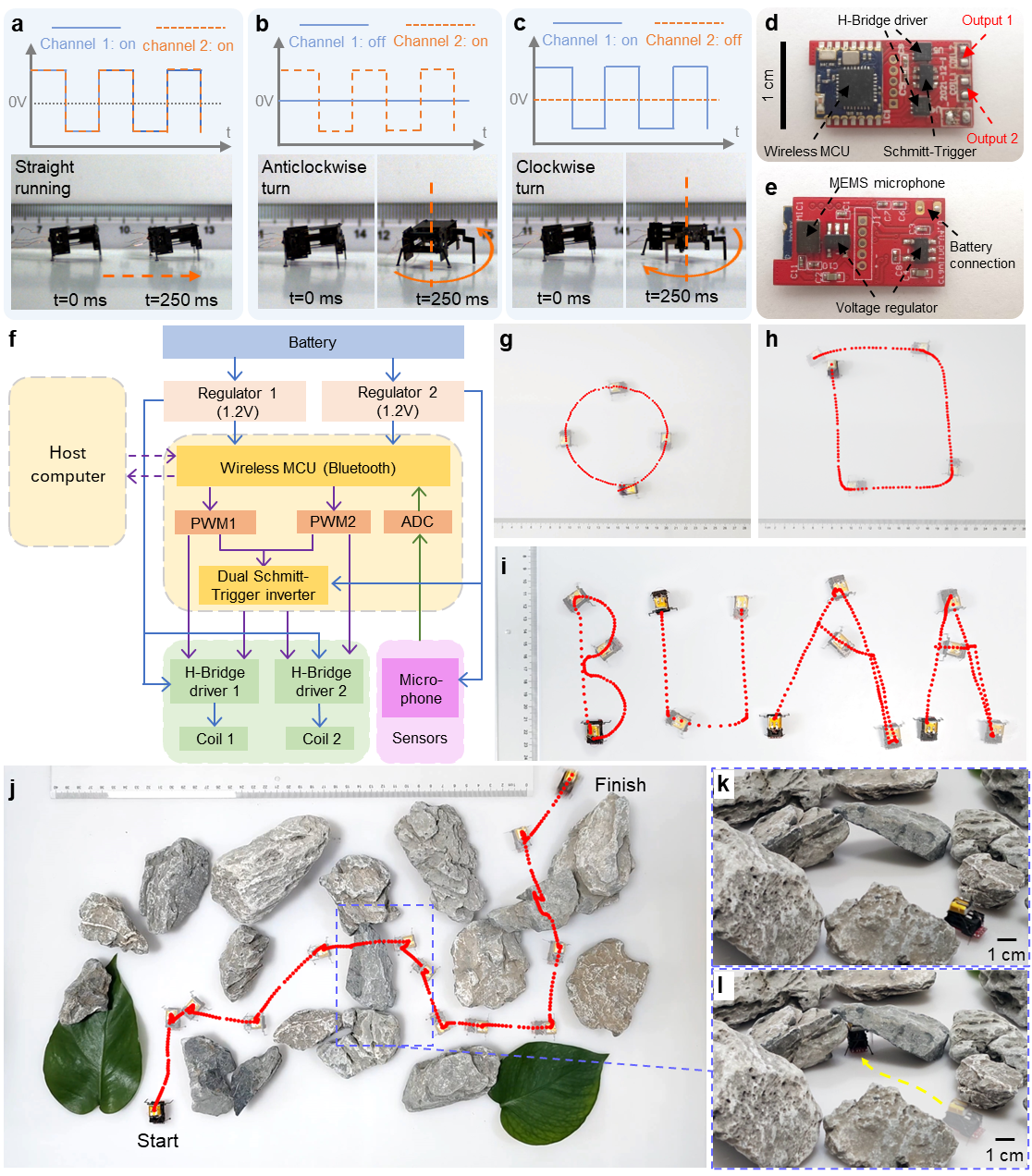
图3 BHMbot机器昆虫控制策略
BHMbot机器昆虫可以适应多种应用场景,例如灾后救援、航空发动机检测等。目前已完成求救信号采集验证,可以模拟灾后搜救的场景。在模拟场景中,BHMbot机器昆虫穿过石头等障碍物后到达倒塌房屋附近,然后采集房屋内部发出的SOS求救信号并将其回传至控制端(图4a,图4b,见视频6)。除用于灾后搜救外,研究人员希望未来BHMbot机器昆虫也可用于航空发动机结构损伤检测。BHMbot机器昆虫体积小、机动性高,可以携带图像采集模块进入发动机内部开展结构损伤检测,可以克服现有目视检测和孔探检测技术可达性不足的缺陷。目前,BHMbot机器昆虫已经实现在航空发动机内部曲面结构上的脱线可控爬行,如涡扇发动机外涵道(图4c,视频7)、涡喷发动机尾喷管(图4d,视频7)。未来,BHMbot机器昆虫将集成微型摄像头以实现发动机内部结构的图像采集和回传,并基于采集到的图像开展结构损伤智能识别。
视频6-声音采集
视频7-发动机内部爬行
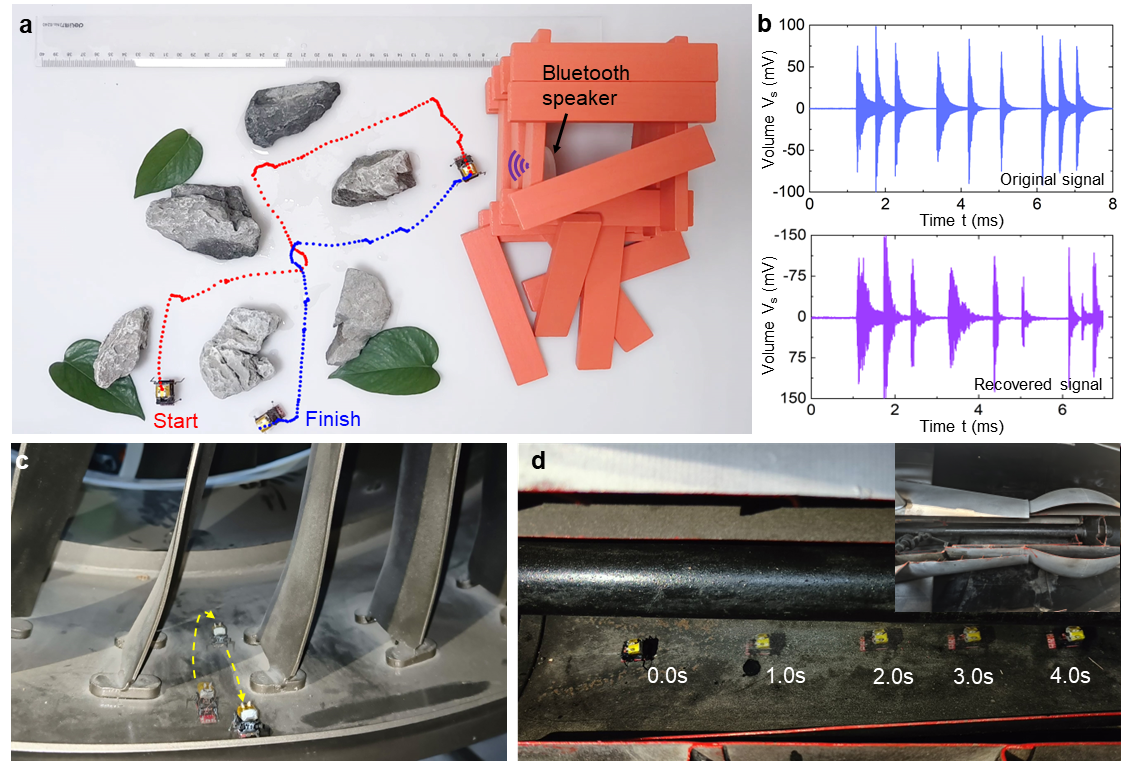
图4 BHMbot机器昆虫应用场景演示
附:北航作者简介
共同第一作者

刘志伟 北京航空航天大学助理教授,硕导
北航能源与动力工程学院助理教授,硕士生导师,入选2024年北京市青年人才托举计划。主要从事昆虫尺寸微型仿生机器人、氢能航空电推进等相关研究,在Nature Communications, IEEE Transactions on Robotics, Applied Energy, International Journal of Mechanical Sciences 等国际期刊发表SCI论文40余篇,受邀在IEEE MEMS 国际会议做大会报告2次,授权国家发明专利15项,承担博士后科学基金面上项目、国家自然科学基金青年项目、北京市自然基金面上项目、科技委创新项目、北航青年拔尖人才支持计划等纵向课题。

詹文成 北京航空航天大学博士生
博士生导师为闫晓军教授、刘志伟助理教授。研究方向为微型机器人动力与控制,在Nature Communications, Measurement, 和IEEE Robotics and Automation Letter等国际期刊发表SCI论文7篇,授权国家发明专利一项。
共同通讯作者

闫晓军 北京航空航天大学教授,博导
教授,博士生导师,入选国家级领军人才计划,北航能源与动力工程学院院长,教育部先进航空发动机协同创新中心副主任,美国加州大学Berkeley分校访问学者。长期从事飞行器动力装置相关基础研究,在Science Robotics、Nature Communications、International Journal of Plasticity等期刊发表SCI论文80余篇,EI论文60余篇,授权国家发明专利35项。研究成果应用于航天飞行器和航空发动机。获全国百篇优秀博士论文、教育部新世纪优秀人才、教育部科技进步二等奖、湖南省国防科技进步一等奖、“航空强国中国心”教育基金突出贡献奖特等奖等。
论文原文链接:https://doi.org/10.1038/s41467-024-47812-5







